Dans la lignée de ma boîte à boutons je me suis attaqué à la construction d'un altimètre codeur le plus petit possible.
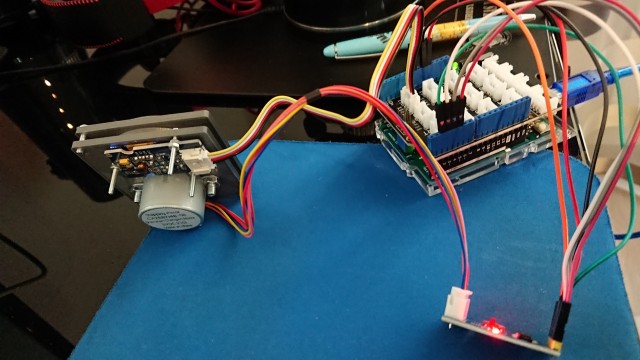
Il se compose d'une Arduino Uno, d'un moteur pas à pas 28BYJ48 (l'interface entre l'Arduino Uno et le moteur est un ULN2003A) et d'un écran Oled de 0.96" (128*64 pixels). L'habillage est réalisé en imprimante 3D (PLA) et sont de ma conception
Pour le moment c'est un prototype: je n'ai pas fixé le micro-switch qui permet la détection du "zéro" du moteur pas à pas et il n'y a pas de potar pour régler la pression de référence...
Néanmoins ça marche plutôt pas mal comme vous pouvez le voir dans cette petite vidéo :
Elle montre le passage à plusieurs altitudes en monté et en descente. Pour le moment les altitudes sont envoyées par la liaison série de l'Arduino mais à terme je voudrais l'interfacer avec les simulateurs que j'utilise.
Cette vidéo permet aussi de voir une des limites du montage : la vitesse maximale du moteur pas à pas qui est trop basse. Malheureusement je ne peux rien y faire en soft, c'est le matériel qui me limite : il faudra que je remplace ce moteur par un autre plus véloce dans la version définitive.
Il est donc possible que je finisse par utiliser ce proto avec une petite centrale inertielle équipée d'un capteur de pression atmosphérique (en ce cas la vitesse de l'aiguille ne risque pas de me gêner, je ne marche pas si vite que ça !).
Quelques photos en plus :
L'intégralité du montage
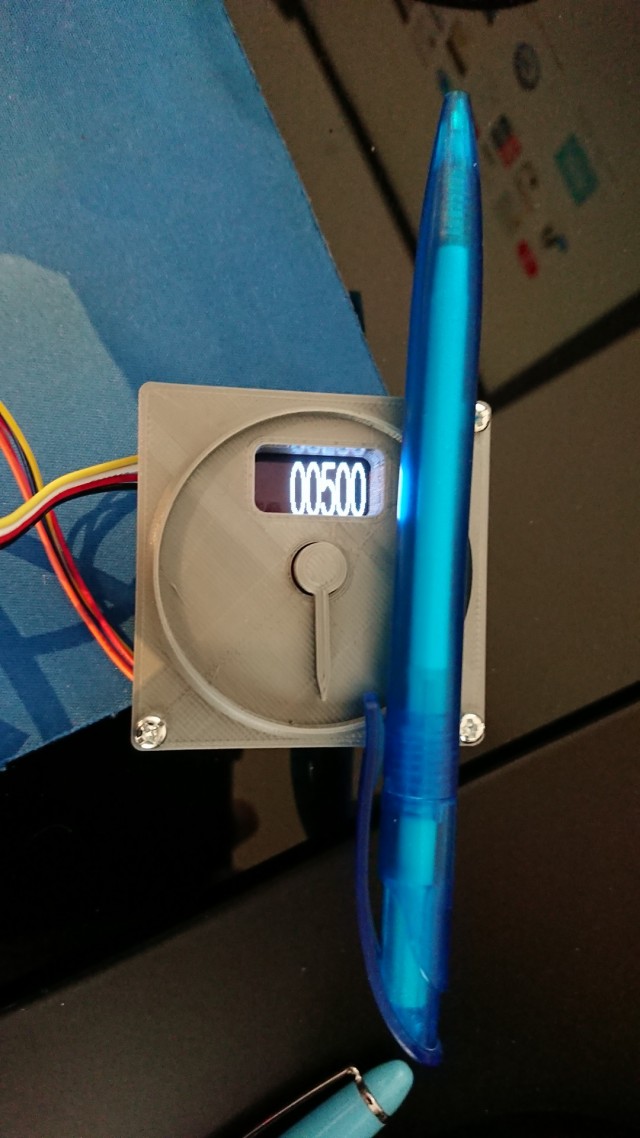
Vue de face :
Vue de face avec un stylo pour donner une idée de la taille :
Re: Altimètre de poche fait maison
Publié : dim. mai 03, 2020 10:47 pm
par Hombre
Magnifique, belle mécanique...
Re: Altimètre de poche fait maison
Publié : lun. mai 04, 2020 7:28 pm
par Cat
Pas mal !
Re: Altimètre de poche fait maison
Publié : mar. mai 05, 2020 11:18 am
par Milos
Le stylo donne une idée de la taille de l'engin ...
Re: Altimètre de poche fait maison
Publié : mar. mai 05, 2020 8:12 pm
par Bacab
Merci !
Une petite question en passant :
Est-ce que quelqu'un a une idée de la vitesse maximale à laquelle un altimètre peut tourner ?
Est-ce que quelqu'un a une idée de la vitesse maximale à laquelle un altimètre peut tourner ?
Comme le dit Cat', ça peut tourner très vite, oui . Tout dépend évidemment de ton taux de montée (ou de descente); sur Mirage 2000, le vario est gradué jusqu'à 6000 ft/mn, et la plupart du temps, l'aiguille est en butée...
Re: Altimètre de poche fait maison
Publié : mer. mai 06, 2020 6:45 pm
par Bacab
Actuellement j'atteins les 15000 ft/mn (15 tours par minutes et 1 tour = 1000 ft). Je trouve ça lent par rapport à mon ressenti sur simulateur. Dans le commerce il existe le même moteur avec des réducteurs différents (/32 ou /15 plutôt que /64) ce qui me permettrait d'augmenter la vitesse (au détriment de la précision mais c'est secondaire et ça ne devrait pas se voir). Avec un réducteur 32 je double (presque) la vitesse et avec le 15 je passe à 50 RPM ce qui devrait me donner du 50000ft/min ou 830 ft/s. Est-ce suffisant ou faut il que je cherche plus véloce ?
Re: Altimètre de poche fait maison
Publié : mer. mai 06, 2020 6:46 pm
par Cat
Oh je crois que 50.000ft/mn c’est suffisant...
Re: Altimètre de poche fait maison
Publié : jeu. mai 07, 2020 9:50 am
par matbog
Ce moteur n'est pas vraiment adapté pour ton utilisation. Il est plus fait pour pour des applications où il y a besoin d'un peu de couple.
Je partirais plus sur de X27 si j'étais toi, c'est fait pour motoriser des aiguilles.
Re: Altimètre de poche fait maison
Publié : jeu. mai 07, 2020 11:43 am
par Bacab
Le x27 je ne le trouve chez aucune boîte d'électronique sérieuse sinon c'était mon premier choix.
Je me suis basé pour le choix du stepper sur le site simvim.com où les 2 moteurs le miens et le x27 sont listés.
Re: Altimètre de poche fait maison
Publié : sam. sept. 11, 2021 10:06 pm
par Bacab
J'ai repris la construction de mon mini-cockpit il y a deux semaines et ça a un peu évolué. Je vous laisse en juger par vous même :
Ce sera plus évident une fois les graduations collées mais vous pouvez voir :
un anémomètre | un compas
un altimètre | un vario
Tout ça fonctionne au poil lorsque je fais mes tests et l'heure est venue d'essayer de s'interfacer avec DCS Bios. Sauf que horreur et damnation ! Il n'y a pas de documentation (enfin si, si vous connectez une led ou un bouton, la c'est bon, mais pour le reste c'est pas Byzance). J'ai installé le plugin commondata qui me donne des méthodes pour récupérer les données qui m'intéressent mais je ne comprends pas comment les obtenir sur mon Arduino. Je pensais qu'en déclarant un callback branché sur l'adresse qui va bien le tour était dans le sac mais manifestement non. oui si en fait ça marche mais pas sur tous les avions, le common a pas l'air d'être si common que ça ...
Donc maintenant mes cadrans bougent ! Sauf que que c'est n'importe quoi, comme si DCS Bios ne m'envoyait pas les bonnes valeurs. J'ai vérifié dans l'interface Web mais je ne vois pas les valeurs aberrantes circuler (tout à l'air normal). Je pense néanmoins que c'est DCS bios le problème car dés que je met pause les cadrans se mettent tous à la bonne position !
Ce moteur n'est pas vraiment adapté pour ton utilisation. Il est plus fait pour pour des applications où il y a besoin d'un peu de couple.
Je partirais plus sur de X27 si j'étais toi, c'est fait pour motoriser des aiguilles.
c'est multi tour un x27 ? je n'ai pas l'impression... donc pas bon pour alti, compas,.... mais pour tout le reste si ? Toujours si j'ai bien compris, il y a un capteur de référence inclus dedans ?
Re: Altimètre de poche fait maison
Publié : sam. sept. 18, 2021 9:20 am
par matbog
Il me semble qu'il y a seulement une butée qui sert pour l'initialisation du moteur. Si tu enlèves la butée et que tu rajoutes un capteur pour l'initialisation il devient multitour. C'est ce que j'en ai compris en tout cas.
Il me semble qu'il y a seulement une butée qui sert pour l'initialisation du moteur. Si tu enlèves la butée et que tu rajoutes un capteur pour l'initialisation il devient multitour. C'est ce que j'en ai compris en tout cas.
C'est ça, il suffit d'ouvrir le moteur, de couper et poncer la butée et tu obtiens un moteur pas à pas multi-tours. Pour l'initialiser au début il faudra par contre un capteur (comme les photodiodes que vous pouvez voir) afin de lui permettre de se recaler.
Re: Altimètre de poche fait maison
Publié : jeu. mars 28, 2024 6:43 pm
par Bacab
Et donc 3 ans plus tard, ce cockpit et bien c'était vraiment beaucoup de travail pour rien ==> les X27 sautent des pas aléatoirement même à petite vitesse et donc tous les instruments finissent par afficher nawak. Bref, ça a rapidement fini dans un placard. Reste que l'idée d'en faire une V2 me trottait dans la tête depuis un moment. Et j'ai fini par sauter le pas. Mais cette fois fini les demi-mesures :
- exit les copies de moteurs pas à pas de mauvaises qualités et bonjour les NEMA 17
- les petits instruments c'est mignon mais ça complexifie trop le design, allez hop je double la taille (presque) de tout ce petit monde
- et puis quatre instruments c'est batard comme nombre, il y a un sentiment de trop peu comme avec les frites à la cantine, et hop je t'en mets 2 de plus
- coté technique les 2 Arduino qui communiquent pour piloter le bordel c'est suboptimal. En exploitant jusqu'à la dernière broche d'une Uno et en utilisant des drivers de moteurs pas à pas au lieu de simples ponts en H, tout tien sur une carte
- ah et l'USB c'est trop limite pour l'alimentation, donc je passe sur une alimentation dédiée de 12 V, 6.5 A avec régulateur & Co pour fournir un rail 5V pour la logique et les servos
Donc je reprend la modélisation :
Et j'imprime !
A faire :
- la peinture : en cours (4/6 terminés)
- l'impression, le découpage et le collage des quadrants (tous modélisés avec Qcad, c'est le feu ce logiciel ! *)
- l'impression 3D du boitier( en deux pièces qui mettront 8h30 à s'imprimer)
- l'impression 3D du fond de boitier et y fixer les connecteurs, prises et le convertisseur de tension
- trouver un service de découpe de plexiglas et commander la glace frontale
- profitez ? (en espérant que le code que j'ai écris fonctionne sans trop de soucis).
* : voyez par vous même:
Hyper facile à prendre en main si vous avez l'habitude des logiciels de CAO. Le plus dur ça a été de trouver comment activer/désactiver certaines options mais le design en lui même m'a pris moins d'une heure sans connaître le logiciel. Et c'est dispo gratuitement pour une utilisation non commercial.
Et c'est décevant :( En effet ça ne se voit pas forcément à l'écran mais la peinture noire s'écaille déjà. Et je trouve l'aspect des cadrans collés pas génial. Je change donc mon fusil d'épaule avec une V 1.5 où les cadrans sont imprimés en relief, directement avec du plastic noir, et où seul les chiffres et les lettres seront peints en blancs. Par ailleurs, si j'apprécie beaucoup l'horizon artificiel que j'ai trouvé chez un créateur sur Thingiverse, pour passer à une version peinte il me faut forcément le refaire. Et zou, on repart sur l'outil de modélisation :
de face :
Attention : tous les instruments ont été mis à jour au niveau de la plaque arrière pour rendre traversant le trou de fixation du capteur de proximité afin de pouvoir l'attacher de manière plus fiable en utilisant une vis M3x10 mm et un écrou Hu. Originellement le capteur tenait juste avec la vis prise dans la masse imprimée en 3D mais avec certaines imprimantes/certains réglages cela ne tient pas, d'où la modification.
Re: Tableau de bord DIY
Publié : dim. mai 26, 2024 12:28 pm
par Vico
beau boulot !
Re: Tableau de bord DIY
Publié : dim. mai 26, 2024 2:22 pm
par dureiken
Superbe !! vraiment superbe bravo
Re: Tableau de bord DIY
Publié : mar. mai 28, 2024 6:19 pm
par Bacab
Merci pour vos compliments
Pour ceux qui souhaiteraient construire le compas, j'ai procédé à une mise à jour du design, en V2 donc.
J'ai fait un premier essai avec le F-5 : tout fonctionne au poil. Je finis le coffrage et ça sera bon.
Re: Tableau de bord DIY
Publié : jeu. mai 30, 2024 2:53 pm
par Bacab
Dernière ligne droite :
De face (notez le compas en V2)
De derrière (ça a l'air d'être le bazar mais je vous jure que c'est plutôt bien agencé et logique ) :