Thrustmaster Pendular Rudder… enfin
Cela fait maintenant presque plus de 10 ans qu’à chaque fois que nous croisions Thrustmaster lors de salons ou d’événements nous les harcelions (n’ayons pas peur des mots) en leur demandant :
“Alors vous le faites quand votre palonnier hardcore ??”
C’était même devenu un petit jeu entre nous …
Mais voilà nous y sommes enfin, certainement lassé de voir les concurrents écouler leurs “rudder” par wagons entiers, Thrustmaster a décidé d’écouter les petites voix du net (et des commerciaux) .
Vous pourrez (ou pas ) le pré commander a compter du 13/07/2018 sur la boutique thrustmaster.
En guise d’échauffement (et pour sonder le marché) Thrustmaster a commencé par le TFRP .
Palonnier plus orienté moyenne gamme avec un look un peu cheap il est vrai . Une réussite commerciale car plébiscité par les “space simmers” en manque d’axes, Thrustmaster avoue en vendre des palettes entières, surtout combiné avec le T16000 Hotas …
Mais pour nous les “Harcore simmers” (les vrais les durs les tatoués) il ne comble que partiellement nos attentes…
Evoqué à demi-mots lors des 25 ans de Thrustmaster, le TPR (Thrustmaster Pendular Rudder) palonnier pendulaire Thustmaster, a lui, pour ambition de compléter la gamme “Hardcore” portée par le Hotas warthog.
Annoncé à 500 euros (oui je sais ça pique !) il peut difficilement s’offrir le luxe de décevoir ou d’être perfectible …

Car trouver un bon palonnier qui soit à l’aise sous bureau et dans un cockpit est compliqué, les positions de pilotage ne sont pas du tout les mêmes.
Dans un cockpit on peut se retrouver “presque” au même niveau que le palo et pour peu que vous ayez une colonne centrale il faut que l’écartement des pédales soit adapté.
Alors qu’utilisé sous un bureau on surplombe littéralement ce dernier et devoir trop écarter les pieds peut parfois être fatiguant a la longue.
Tout cela pour vous dire que nous attendions tous depuis des années un palonnier haut de gamme précis, polyvalent. Sans compter les contraintes différentes entre recevoir une poussée horizontale (ou presque) de quelques kilos et une poussée venant du haut augmentée par une partie du poids du simmer….
la réponse de Thrustmaster à ces contraintes est le TPR , un palonnier pendulaire ….
Le technologie pendulaire est une première pour cette gamme de prix.
On sort ici des solutions habituelles de glissières et/ou de pédales fixées sur une ossature type “parallélogramme” ayant au centre le dispositif de “tension” et un capteur.
La méthode classique serait de suspendre les parties mobiles (les pédales) en les fixant par le haut, à l’image d’une balançoire et de son portique .
Thrustmaster a décidé de confier cette charge (et le mot est parfaitement choisi) à un système de bras en ” L” inversé qui supporte par la base l’axe de rotation de la pédale et par le haut le système de freinage différentiel.
C’est une solution innovante qui s’inspire de ce que l’on peut trouver dans le monde aéronautique.
La solution pendulaire libère la mécanique des contraintes de friction permettant ainsi un mouvement fluide et linéaire. Associé à de bons capteurs à effet hall et un système d’amortissement c’est une solution technique qui sur le papier est pleine de promesses.
Mais rien n’est facile (sinon les autres l’auraient déjà fait)
Inconvénients :
- Il faut faire du solide et du rigide car potentiellement une partie du poids du simmer (et ils sont parfois bien nourris) vient se reporter sur les pédales (qui sont dans le vide) et sur le système de fixation/mesure. Voir le dispositif se tordre ou prendre du jeu sur les axes ou les roulements serait inacceptable pour le prix demandé.
- L’encombrement : il faut un support beaucoup plus haut pour permettre le “balancement” des pédales.
- Il faut une base stable, bien ancrée au sol car l’ensemble aura tendance à tourner autour de la colonne en fonction des actions sur les pédales. Et nous savons tous que lors des phases de dog ou de voltige nous pouvons être sans pitié pour nos palonniers…
Thrustmaster a t il finalement réussi à résoudre ces défis et à sortir un palonnier référence ?
Nous le verrons à la fin de ce test .
Premières impressions
Première bonne surprise, la taille imposante du paquet et le poids, c’est gros et du lourd : 7 Kg sur la balance !
A première vue tout est en métal (sauf les capteurs des pédales de frein) ce qui donne une impression de robustesse. Cela donne confiance dans la solidité du palo.
En terme de poids on n’est pas encore au niveau du palo RealSimulator mais on s’en rapproche.
Deuxième bonne surprise pour ceux qui aiment la mécanique, les mécano et les maquettes.
Pour des causes de logistiques le TPR n’est pas monté, il vous faudra donc finir de l’assembler vous mêmes.
Pas de panique la manip est super simple, le colis contenant tout ce qu’il faut pour procéder aux derniers ajustements (clés allen et plates).







Principale particularité du TPR : son système pendulaire.
Deux bras imposants en “L” inversé soutiennent les “pédales et le système de capteurs de freins.
Sur ses bras sont fixés :
- un axe soutenu par la massive colonne centrale
- un système de renvois via des biellettes et de ressorts sur l’arrière de la colonne.
- le système de fixation/réglages ”haute” des pédales
- les capteurs/amortisseur de freinage
Les bras sont très épais et leur forme travaillée pour assurer une solidité et rigidité importante. Cela renvoie un sentiment de robustesse et de solidité ….
la colonne centrale est une tôle bien épaisse contrainte pour former une colonne. Bombée sur la face avant et plate sur la face arrière pour accueillir les systèmes de mesures et de réglages.
C’est elle seule qui supporte l’intégralité des “équipements” du TPR en plus de vos pieds.
Il fallait donc qu’elle soit massive, solide et très stable. Ce qui semble être le cas au premier coup d’oeil !
C’est à l’arrière de la colonne que se trouvent le capteur et les systèmes de réglage de la résistance et du retour au centre.
Le mouvement peut être perçu comme un “balancement pendulaire “ totalement fluide et linéaire et ceci tout au long de la course. Il n y a pas de point “dur” (un index mécanique par exemple) marquant la position neutre, la transition de force/résistance entre les deux pédales marquant le point centrale.
La colonne est totalement noire sur la version finale (lire ci-dessous) .


Certaines photos datent d’une version “pré-production” dotée d’un dessus gris. A part cette modification de couleur pas de changement significatifs entre ces 2 versions.
La version finale ne sera distribuée qu’en version toute “noire”
Les pédales, elles aussi en métal, sont honteusement “pompées” sur celles du F-16 et c est tant mieux car elles sont superbes !!
La base est large percée de 4 trous pour les installations sur cockpit et de 4 gros pads antidérapant sur la face inférieure (nous reviendrons sur les pads dans le chapitres “tests en vol”).
Pour les dimensions exactes rendez-vous plus bas !!


Alors que penser après ce premier examen?
Le TPR respire la solidité et la belle mécanique. pas de plastique que du métal (sauf sur les biellettes et le capteur de freinage), du gros boulon et des parties mécaniques de qualité.
Si on rajoute le poids +de 7 kg, c’est un superbe objet que nous avons devant nous.
Autant un iphone X nous paraît superbe mais fragile, autant le TPR inspire un sentiment de beauté industrielle indestructible.
Mais je m’égare dans mes comparaisons, passons à l’assemblage.
L’assemblage:
Simplissime
Il suffit d’’insérer les 2 pédales à assembler sur les bras puis les rotules de freins à fixer sur les pédales : 2 écrous et 4 vis plus tard le TPR est prêt .
Vous trouverez tout ce qui est nécessaire à l’assemblage dans le sachet d’outils fourni.

Après la séance de mécanique (oui faut mériter de voler avec ce palo…) on passe aux réglages…















Les réglages
Il y a donc plusieurs dispositifs de réglages disponibles sur le TPR :
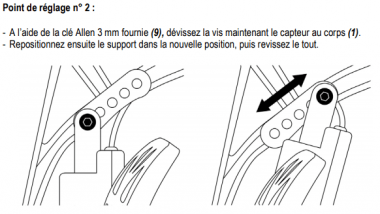
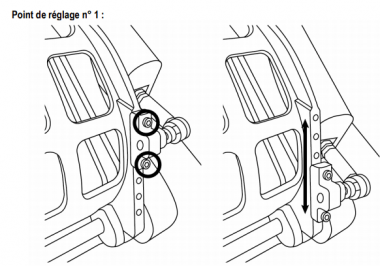
- L’inclinaison des pédales qui se règle en modifiant les 2 points de fixation de la pédale
-




Pour vous aider à régler l’inclinaison des pédales nous avons testé toutes les possibilités, compilées dans le tableau ci-dessous
Combinaison possibles
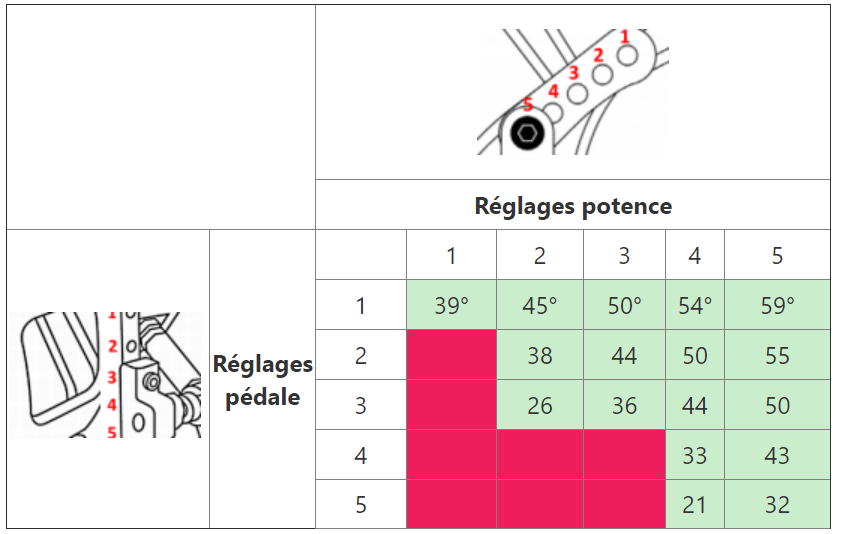
la précision des mesures C6 peut varier de 1 ou 2 degrés
- La dureté de la course des pédales, je n’utilise pas le mot friction car il n ‘ y en a plus aucune. Cela se règle via la position des 2 ressorts situés à l’arrière de la colonne
La position ou le retrait d’un des deux ressorts impacte directement sur la “dureté” de la course - L’amortissement du retour en position centrale : via 4 butées réglables




l’avis de Icemaker
Les réglages de dureté de l’axe de lacet permettent d’avoir un réglage ajusté à vos envies. Même si certains pourraient regretter de pouvoir le régler plus dur, mais franchement au maximum on a déjà du répondant sous les pieds. Pour ceux utilisant des fauteuils équipés de roulettes il va falloir trouver un moyen d’éviter de partir en arrière lors de de combats un peu violents… ;o)
Ce qui manque en revanche c’est l’absence de réglage de dureté des pédales de frein, même si il est impossible de freiner sans s’en rendre compte, on aurait apprécié un peu plus de répondant.
Il est aussi possible de régler le point de transition central de l’axe de lacet, pour ma part j’ai choisi un réglage qui permet de de sentir le point neutre, mais celui-ci reste très léger lorsque l’on bascule rapidement entre un côté et l’autre. On peut toutefois n’avoir aucun point central si on le souhaite.
Descriptif technique :
Poids : 7 kg
Capteur Hall palonnier : 16 bits : 65536 valeurs (précision de 0.005 degré)
Capteur hall freins : 16 bits : 65536 valeurs
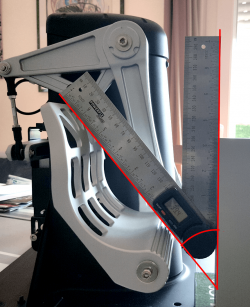
Inclinaisons max pédales (référentiel Horizontal ) 35° et 75° données Tm
Dimensions
Hauteur (socle + colonne centrale) : 36 cm
Largeur max socle : 39.5 cm
Profondeur socle : 28 cm
largeur pédales : 14 cm
Ecartement pédales : 24 cm
(maj) : Fiche technique avec cotes (dimensions) : dispo sur le site de Thrustmaster
Package : documentation + outillage + cable USB











Installation drivers:
Il suffit d’installer les drivers disponibles sur le site de Thrustmaster. Les drivers Warthog et TPR seront unifiés d’ici la sortie du produit.
Puis de brancher le câble USB. la prise est située à l’arrière de la colonne.
Un logiciel de calibration sera également disponible afin de pouvoir régler les “deadzones” des différents axes ainsi que celle de la position centrale.
Il permettra également de définir la position de cette dernière.
Après cette partie technique place aux tests en vols. La parole aux testeurs
Afin de rester impartial et surtout le plus complet possible ce test est rédigé par 3 testeurs.
Chacuns ayant ses simus préférés, une utilisation et un vécu hardware bien différent !!
Nous avons eu accès au TPR quelques mois durant les phases de développement.
Indicatif : barda
Webmaster Il-2 sur checksix – lead du squad C6 sur Il-2
Palonniers pratiqués Saitek puis Palo suspendu maison (sur vérins à huile)
Simulateurs pratiqués EAW – IL-2 (toutes versions) + BOS – DCS
Installation : cockpit
On commence sur sur IL2 BoX, le premier décollage est réussi, maîtrise de l’axe sans problème, une bonne impression de “facilité”.
le palo est “trèèès” précis, à la fois dans les petites corrections mais aussi dans les “grands coups de bottes”.
Coté dureté
je suis réglé au milieu, c’est ce qui me convient le mieux.
je sors les petites butées en caoutchouc d’un 1/4 de tour juste pour être sûr d’être en butée dans tous les cas.
Mais c’est une manie de vieux…. (NDC: pas si vieux que cela le Barda)
Les rotules des pédales sont fixées en haut ce qui les incline confortablement pour ma position semi allongée dans mon cockpit “aker barnes”.
Usage :
Je positionne les pieds de 2 façons :
– Pieds sur les axes de palo pour les décollages/atterrissages, pour freiner comme il le faut.
– En croisière je pose les talons au sol : la précision sur les petites corrections suffit.
– En combat, je pense que je remonte les pieds sur les axes pour botter plus fort, mais ce n’est pas évident.
Une fois testé sur IL2, je passe sur DCS et là c’est la même sensation, bien utile en warbird et hélico !
Pour DCS je conserve les réglages évoqués plus haut.
Mon point de vue :
La qualité de fab et la solidité sont au rendez-vous et surtout la précision est là.
Le mouvement pendulaire est naturel et agréable.
Le palo m’a plu tout de suite et il est resté en place dans mon cockpit depuis son arrivée.
Il me faut vous expliquer que je suis passé d’un saitek à un palo “maison” qui est resté en place presque 10 ans.
C’était un palo métal, suspendu et pendulaire, avec en plus un système à vérins à huile pour le mouvement et sa fluidité.
Ce palo me plaisait et je l’ai toujours remis en place après avoir testé d’autres palo avec des mouvements à plat.
Mais depuis le test du palo TPR, mon palo perso n’est pas revenu sous le cockpit.
C’est le TPR qui est resté…..
Points faibles :
Les efforts au pieds sont importants, donc la base du palo peut parfois bouger, ce qui est gênant (par exemple durant une course de décollage en Spit ….)
il faut donc le fixer via les 4 trous prévus (dans un cockpit) , ou l’empêcher de glisser, en le plaçant par exemple sur une couche de mousse.
J’ai choisi une mousse souple (style néoprène de combinaison de plongée assez fine) et alvéolée d’une face dans laquelle le palo s’enfonce et ne glisse plus (Lino).
Un bon adhésif double face peut faire également l’affaire si madame ne vous voit pas faire….
Il est beau mais ça ne se voit pas quand il est posé au sol, avec les pieds dessus.
Points forts :
La précision, le mouvement pendulaire, la dureté réglable…
Il passe nickel sous le Aker Barnes.
Indicatif : Icemaker
Webmaster technique sur checksix
Palonniers pratiqués, Saitek, Realsimulator, Simped, TFRP, CH Products.
Simulateurs pratiqués IL-2 (toutes versions)+ BOS – DCS – Arma III
Installation : Bureau
Le débattement des axes est au top pour avoir une précision millimétrique, les sondes à effet hall omniprésentes sur ce palonnier contribuent à reproduire le moindre de vos mouvements dans le simulateur.
Pour des vols à la bille dans les simus d’avion à hélice on peut tenir la position sans forcer.
Le roulage et la tenue d’axe au décollage avec les avions à hélice est naturel et hyper facile, même sur des avions qui “embarquent” comme le FW 190.
On peut enfin “doser” le freinage, point qui le différencie des autres palos que j’ai pu tester dans le passé (surtout le Real Simulator!).
Mon premier vol sous DCS j’ai pris le UH1 sur la carte Nevada, et je me suis amusé à tourner autour d’un château d’eau en gardant le cockpit orienté à l’intérieur du cercle. Je ne pensais pas pouvoir faire ça vu mon niveau de pilotage des hélicos! Avec le TPR j’ai pu.
Faire du vol tactique en gazelle au milieu des arbres et des maisons est un pur bonheur, on gère les trajectoires de façon intuitive et précise.
Je pilote depuis un bureau et j’ai beaucoup apprécié le réglage des angles, qui permet de poser ses pieds à plat sur le palo sans exercer aucune pression sur les freins, tout en gardant les jambes dans une position super confortable.
J’aime voler en gardant les pieds complètement sur le palo sans poser les talons au sol, et là j’ai pu voler pendant quelques heures sans aucune gêne.
La quantité de réglages possibles, rend ce palo compatible avec tous les types de setup pour voler, que ce soit un simple bureau ou un cockpit ultra réaliste, tout le monde y trouvera son compte.
Mon point de vue :
Ce palonnier, à l’instar d’un Cougar ou d’un Wharthog vous accompagnera fidèlement pendant de nombreuses années, même si vous passez d’un cockpit « bureau » à un aker barnes puis à un Pit full réaliste, ce palonnier vous suivra sans faillir.
Petit bémol, sur la version de développement que j’ai pu tester les patins sous la base ont glissé et se sont totalement décollés.
Sur la version finale Thrustmaster semble avoir corrigé le problème, mais j’ai toutefois utilisé deux bandes de velcro double face pour empêcher tout déplacement du palo.
Malheureusement ce genre de mésaventure est fréquente chez tous les fabricants de palonnier.
Même si le prix annoncé (un peu trop élevé à mon goût, 100 € de moins m’aurait semblé plus raisonnable) peut faire grincer des dents, ceux qui aiment tout ramener au prix de l’heure d’utilisation diront que le prix à l’heure de vol est raisonnable au vu des heures que vous allez passer dessus !
Je pense que ce palo va me suivre pendant au moins les 15 prochaines années !
Sauf si TM en sort un encore mieux… Pas sûr que ce soit possible !
Un grand bravo à son concepteur, c’est un grand coup pour TM, qui avec ce palonnier, reste dans le haut de gamme du périphérique pour simmer exigeant.
Indicatif : Ghostrider
Webmaster Checksix
Palonniers pratiqués, Thrustmaster RCS – Elite- CH Product , Saitek, simped,TFRP
Simulateurs pratiqués Falcon 4 BMS+ Il-2 BOS – DCS – FSX ……
Installation : Bureau + cockpit
Ayant usé par le passé un bon panel des palonniers disponibles sur le marché j’avoue ne jamais avoir trouvé un palonnier qui me donnait 100% satisfaction.
Ils avaient tous des défauts ou des limitations : précision, dureté, freins différentiels absents, qualité de fabrication, écartement des pédales, possibilité de réglages, position centrale, fiabilité ….
Voyons ce TPR..
Premier vol sous DCS et je commence compliqué : décoller mon Spitfire
Avec mon palo précédent le TFRP même en appliquant une courbe “léchée” décoller le « spit dansant » était toujours un challenge que je redoutais.
A la mise des gaz le Spit commence a partir, le jeu étant de le faire “danser doucement d’un côté à l’autre en “équilibre” pour garder le contrôle et l’axe de piste (enfin rester sur la piste).
Et la tout de suite le contrôle est plus fin, le dosage du lacet est bien plus précis, moins “brutasse”.
Le potentiomètre à effet Hall et les 65536 valeurs y sont sans aucuns doutes pour quelque chose !!
Il est plus facile de trouver et conserver la bonne position.
Je ne dirais pas que le Spit est dompté et maîtrisé mais il est plus facile de l’encadrer” et de lui dire ou aller …
Vu que je suis lancé je consomme un peu de kero en tour de piste , afin de m’habituer au TPR et après quelques remise de gaz je me lance, “Ghostrider en finale pour un complet”.
Jusque la mes atterrissages étaient au mieux musclés au pire chaotiques. La prise d’axe et le posé n’étaient pas compliqués mais le freinage se finissaient régulièrement soit sur le dos soit en travers ou pire sur le dos en feu …
Le spitfire n’ayant qu’une seule commande de frein il va falloir jouer sur tous les axes du palo en même temps …..
Et là le freinage me paraît moins chaotique, j’arrive vite à trouver le point limite qu’il ne faut pas dépasser (pour ne pas passer sur le dos) et test ultime freiner en corrigeant le roulage en lacet .
Je finis un poil de travers mais toujours sur la piste la tête haute 🙂 !!
TPR adopté pour le Spit !!
Deuxième vol sous DCS et test ultime pour un palo le UH-1H, hélico légendaire de l’US army.
Départ du parking de Nellis pour un exercice de maniabilité.
Je tire sur le collectif, ça décolle ça commence à partir je contre sans soucis la tendance et je me lance dans un survol des taxi way à 2 metres d’altitude.
Et la même topo que pour le Spit, le Huey “me répond” mieux. J’arrive mieux à le placer lors de mes évolutions serrées entre les taxiway, les avions et les bâtiments.
Sans vraiment m’en rendre compte je m’aperçois que je garde naturellement ma jambe gauche plus enfoncée, sans forcer. J’ai trouvé le point d’équilibre encore une fois. Point d’équilibre qui change bien sur en fonction du vol mais la variation de pression se fait naturellement sans à coups.
Du coup je me concentre plus sur les gazs et cela donne un vol plus stable, plus fluide.
C’est vraiment la première fois que cela paraît “facile” de me balader entre les tours du centre de Vegas , de tenter une approche un peu délicate sur un parking d’hôtel ….
Je ne dit pas que le TPR va faire de vous un pilote d’helico hors paire et qu il va faire de vous un dieu du pilotage mais la précision et surtout la course linéaire dans sa dureté facilitent grandement le pilotage !!!
TPR adopté (obligatoire ??) pour le Huey !!
Je ne vous ferai pas le compte rendu de tous les vols test mais les résultats sont les mêmes.
La précision et la linéarité du mouvement des axes sont les premières choses qui frappent !
L’impression que l’avion fait enfin ce que vous voulez qu’il fasse est bien présente.
Le fait de pouvoir appliquer exactement l’action désirée, ni plus ni moins est un régal.
Ce n’est pas un auto-pilote, si vous volez comme une brique il ne faudra pas tout lui mettre sur le dos ….
Coté confort le fait de pouvoir régler l’inclinaison des pédale est un must qui devient vital si comme moi vous passez parfois d’un bureau à un cockpit, si ce n’est pas le cas vous allez trouver “votre” position idéale et n’en changerez plus !!
Points faibles :
Seul petit bémol pour moi sa stabilité au sol.
Le parquet bois massif (mais tendre) de mon bureau n’aimant pas les roulettes et autres rayures je pilote installé sur un revêtement protecteur en PVC spécial bureau.
Durant les premiers jours d’utilisations pas de soucis le TPR était stable et ne bougeait pas autour de son axe (colonne centrale). Mais les jours passant et les patins caoutchouc se salissant le palo a commencé à montrer une volonté d’indépendance et s’est mis a « se promener » sous le bureau en plein dogfight ……
Pas pratique
Thrustmaster a écouté nos remontées et a changé les patins par de plus gros mais selon moi le risque demeure.
Solutions simples :
– Solution dépannage : Scotch “tissé” sur sol , on en fait le tour du socle et il ne bougera plus
– Solution radicale : on utilise les 4 trous et on vise le socle au sol ( voir conseil de discrétion donnée par Barda plus haut)
– Solution pratique : rouleau de velcro adhésif de bonne largeur, 2 grosses bandes sous le socle (devant et sur l’arrière) et on n’en parle plus . Cela permet de le retirer ponctuellement pour le mettre dans son pit 😉
– Solution innovante : tapis anti-dérapant (en néoprène ou autres) solution testée avec succès par votre serviteur depuis 3 semaines.
Mon point de vue :
Comme mes camarades une fois testé difficile de revenir en arrière.
Thrustmaster avec le TPR frappe un grand coup, cela à un coût élevé mais comme pour un bon Hotas ou un bel écran le TPR restera je pense de longues années sur ma config simu.





Bureau Icemaker
Vidéo par Mermin (merci à lui)
Conclusion :
A la question “Thrustmaster a t il finalement réussi à résoudre ces défis et à sortir un palonnier référence ? “
la réponse est oui !
Le choix du systeme pendulaire s’avère être un choix gagnant .
Le TPR est le plus précis et le plus confortable des palonniers que nous ayons testé.Que cela soit pour du vol militaire, civil ou de voltige le TPR va vite devenir une référence auprès des simers argentés.
Car c’est une référence qui se paye (500 euros prix de lancement public) mais pour ce prix vous en aurez pour votre argent !
Alors oui, il y quelques regrets (il faut bien en trouver), l’absence de système de freinage réglable et la stabilité de la base à améliorer mais rien de vraiment gênant ou définitif.
Pour la stabilité c’est le lot de tous les palonnier du marché.
C’est un bien bel objet que nous offre Thrustmaster car en plus d’être confortable, polyvalent et performant il respire la solidité. Et s’offre le luxe d’être également superbe !!!
Dommage de le cacher sous un bureau .
Adopté par Checksix !!!
Orezza
13/07/2018 at 07:08Excellent test!
Très complet, bien écrit et même instructif.
Il ne nous reste plus qu’à l’acheter donc 😉
Merci a toute l’équipe!
Bjorn Thorsen
13/07/2018 at 16:52http://shop.thrustmaster.com/fr_fr/ -20% jusqu’au 31 juillet
Alien Alien
24/07/2018 at 09:43Non valable pour les produits 2018.
Ghostrider
13/07/2018 at 10:11merci pour l’équipe 🙂
Gigio Spaziale
19/07/2018 at 23:29Sont exclus de cette offre: les produits sous licence Ferrari, les nouveaux produits sortis en 2018, les produits dans « Offres Spéciales », « Produits d’occasion » et « Emballage abîmé ».
Ghostrider
26/07/2018 at 12:11Mise a jour du test avec un lien vers le plan technique coté (dimensions exactes)
http://ts.thrustmaster.com/download/accessories/Manuals/TPR/TPR_Rudder_Cockpit_Setup.pdf
Ghostrider
22/08/2018 at 23:38Un simer ayant testé les 2 répond ici : http://www.checksix-forums.com/viewtopic.php?p=1668741#p1668741
Pevekh
07/08/2018 at 01:49Merci pour le test l’équipe… vis à vis d’un mfg crosswind vous en pensez quoi ?
Ypsos
12/09/2018 at 14:24Bonjour
Est ce que quelqu’un a pu le tester sur mac .
J’ai posé la question au support de Thrustmaster qui m’a dirigé pour cette information vers le net.
Merci
Ghostrider
12/09/2018 at 14:53Non pas testé pour ma part sur Mac
Ypsos
13/09/2018 at 13:01Salut
Merci
Ce serait sympa que Thrustmaster prête pour test sur mac ce matériel comme cela se pratique souvent au lieu de me proposer de chercher moi même sur internet .
Antonio
22/04/2020 at 18:32XPlane 11 reconnait le périphérique et demande calibration des fonctions. Ca semble ok mais au lanver d’un « vol » message Péripherique non configuré TPR reconnu mais « aucune affectation d’axe ou fonction ». Alors que je viens de calibrer ? Quelq’un a une idée ? Merci d’avance.
Kima
28/06/2021 at 08:21Bon ben voilà, une piste pour dépenser, pardon, investir un peu d’argent dans du matos qui en vaut la peine. Merci pour ce test!